 2月3日(火):
AIによるルートのマッピング (パーサビアランス)
2月3日(火):
AIによるルートのマッピング (パーサビアランス)
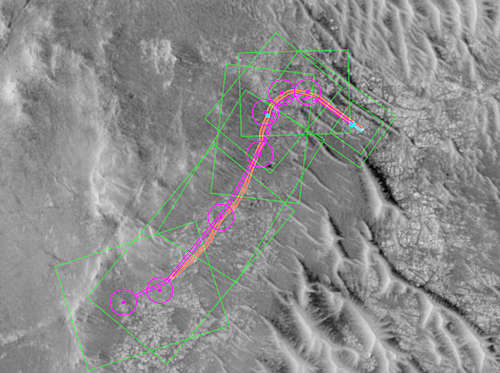
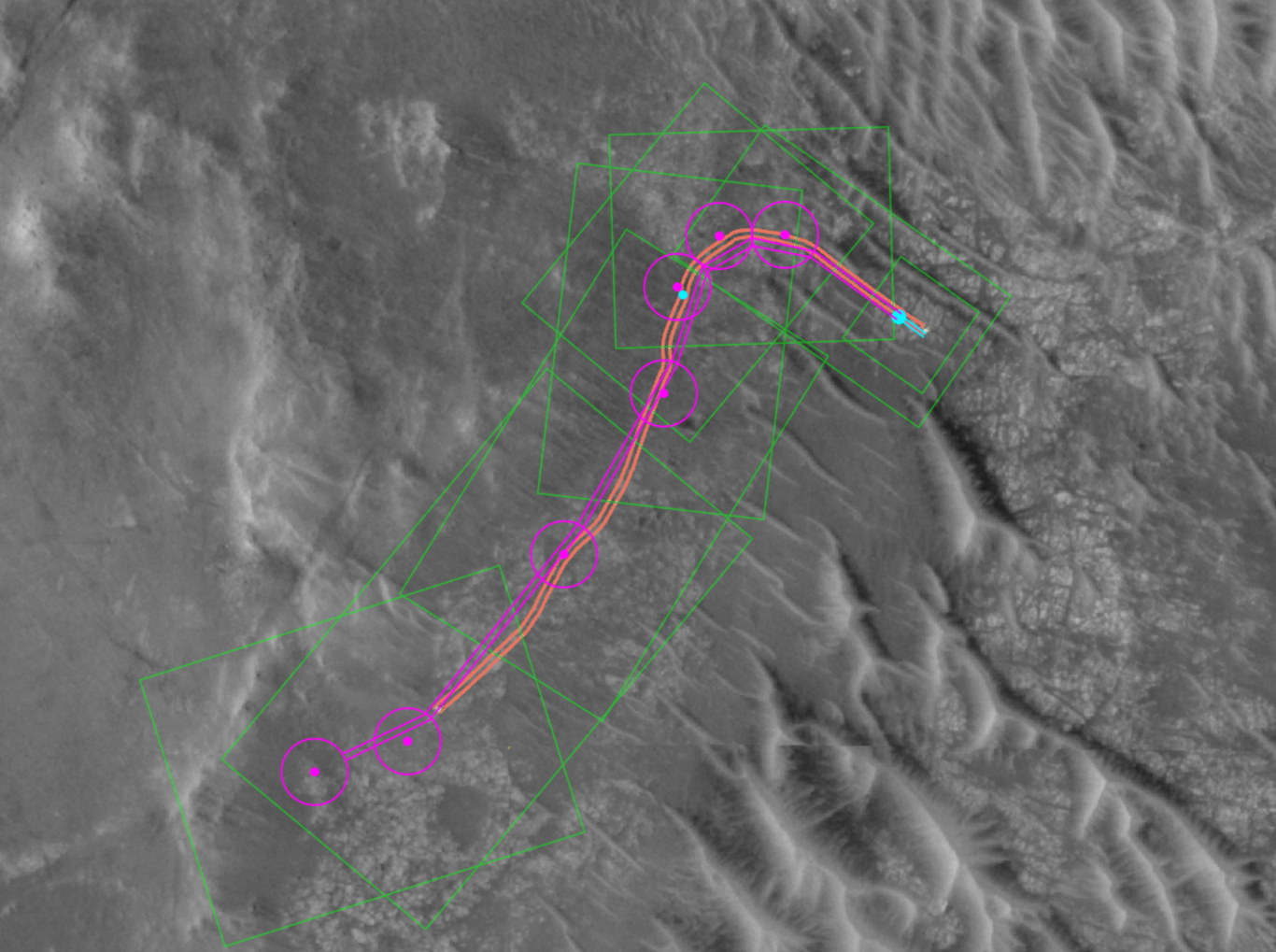
NASAの火星偵察軌道船(MRO)搭載のHiRISE(高解像度画像科学実験)カメラからの注釈付きのこのイメージは、AIが計画したルートと、2025年12月10日、ミッションの1,709火星日にNASAのパーサビアランス・マーズローバーが246メートル走行中に実際に取ったルートを示している。この走行は2回のデモンストレーションのうち2回目で、最初は12月8日に行われ、生成人工知能がローバーのルート計画に組み込まれていることを示した。
マゼンタの線は、ローバーがAI処理されたウェイポイントをたどる場合にローバーの車輪が進む経路を表しており、マゼンタの円で示されている。オレンジ色の線は、ドライブ完了後にダウンリンクされたデータに基づいており、実際にローバーが通った経路を示している。
ルートの開始点にある青い線の短く太い区画は、このミッションのローバードライバーが決定し、ローバーが前方の地表のイメージをもとに決定した走行区間を示している。淡い緑色のボックス内の表面は「キープインゾーン(keep-in zones.)」と呼ばれている。パーサビアランスの自動運転ソフトウェアは、そのゾーン内でのみルートを選択することが許されている。
このグラフは、ローバードライブの計画やパーサビアランスからの大量のエンジニアリングデータの管理に使われるソフトウェア一式の一部であるハイパードライブを使って生成された。
<ひとこと>: 大判はイメージをクリック(タップ)。
Jan 30, 2026










 火星と地球が太陽の反対側に位置し、火星の探査機との火星ミッションの接触が不可能になる期間、太陽との合から解放される中で、NASAは、NASAのディープスペースネットワークと米国国立科学財団のグリーンバンク天文台を使って、メイブン(MAVEN)宇宙船との連絡の試みを再開した。この宇宙船の最後の情報は12月6日だった。
火星と地球が太陽の反対側に位置し、火星の探査機との火星ミッションの接触が不可能になる期間、太陽との合から解放される中で、NASAは、NASAのディープスペースネットワークと米国国立科学財団のグリーンバンク天文台を使って、メイブン(MAVEN)宇宙船との連絡の試みを再開した。この宇宙船の最後の情報は12月6日だった。